
Mechanics: Statics KineticsMomentum Draft for Information Only
Content Kinetics: Angular Momentum
Kinetics: Angular MomentumAngular momentum is another important properties in study kinetics. Angular Momentum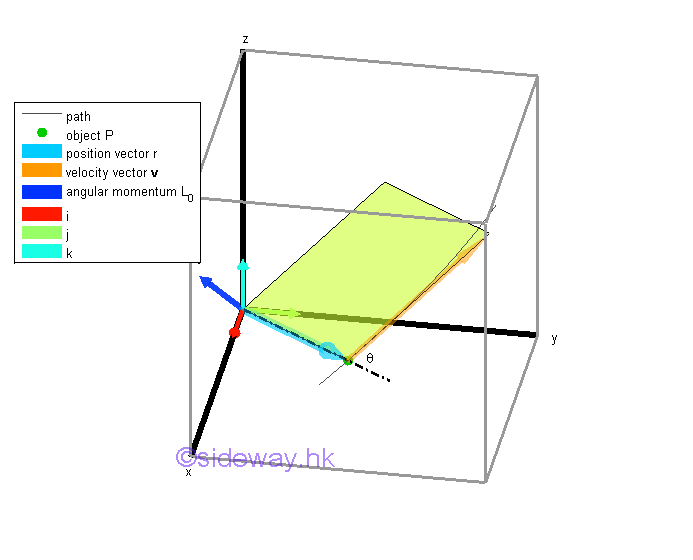
Angular momentum is defined as the moment of the momentum. When an object of mass m moving in space with respect to a newtonian frame of reference. the linear momentum of the object at any instant is equal to the instantanous velocity at the instant time the mass of the object. Similar to the moment of a force, angular momentum L0 of the momentum vector about O at a given instant is defined as the cross product of position vector and momentum vector of the object at the given instant. The magnitude is equal to the product of the momentum, p, along the line of linear motion and the perpendicular distance, d, between the line of linear motion of the momentum and the point of reference. Unlike the moment of a force in static measuring the tendency to rotate, angular momentum is a measure of the quantity of the intantaneous angular rotation of an object. Similar to moment of a force, angular momentum is also a vector quantity to indicate both the director and magnitude of the angular rotation. 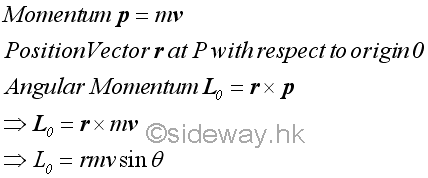
Angular Momentum in SpaceSimilar to moment of a force, angular moment about a reference point or axis in space can also be expressed in form of a determinant. 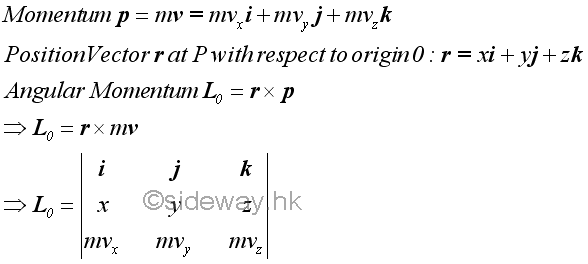
And the components of the angular momentum L0 about a reference point can also be expressed in term of the moments of the components of linear momentum about the coordinate axes. And is equal to 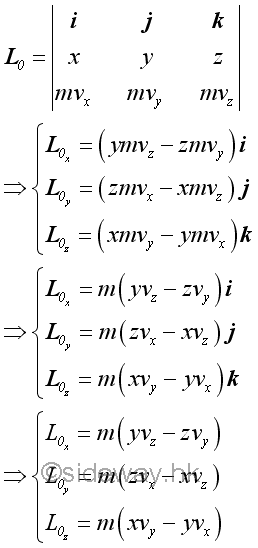
Sometime it is more convenient to consider the polar or spherical coordinate system instead of rectangular coordinate system. 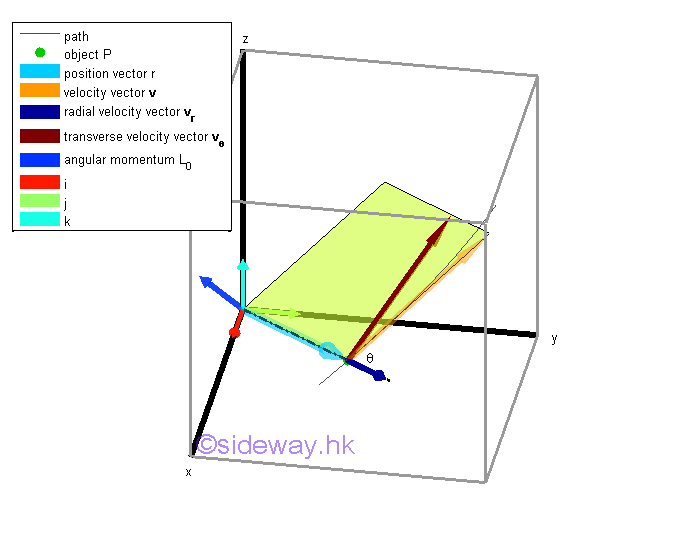
Angular Momentum in a PlaneRectangular Coordinate SystemWhen an object moves in a plane with rectangular coordinate, one velocity vector component and one position vector component of the object are equal to zero. Therefore two components of the angular momentum are equal to zero, the angular momentum becomes always perpendicular to the plane in which the object moves also. 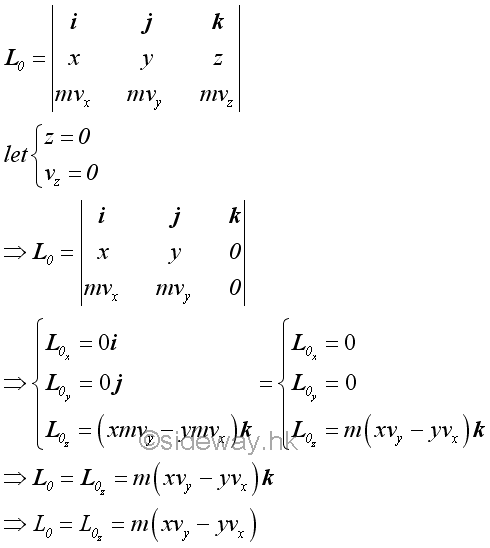
According to the right hand rule, the sense of a counterclockwise angular momentum about a reference point is positive, while the sense of a clockwise angular momentum about a reference point is negative. Polar Coordinate System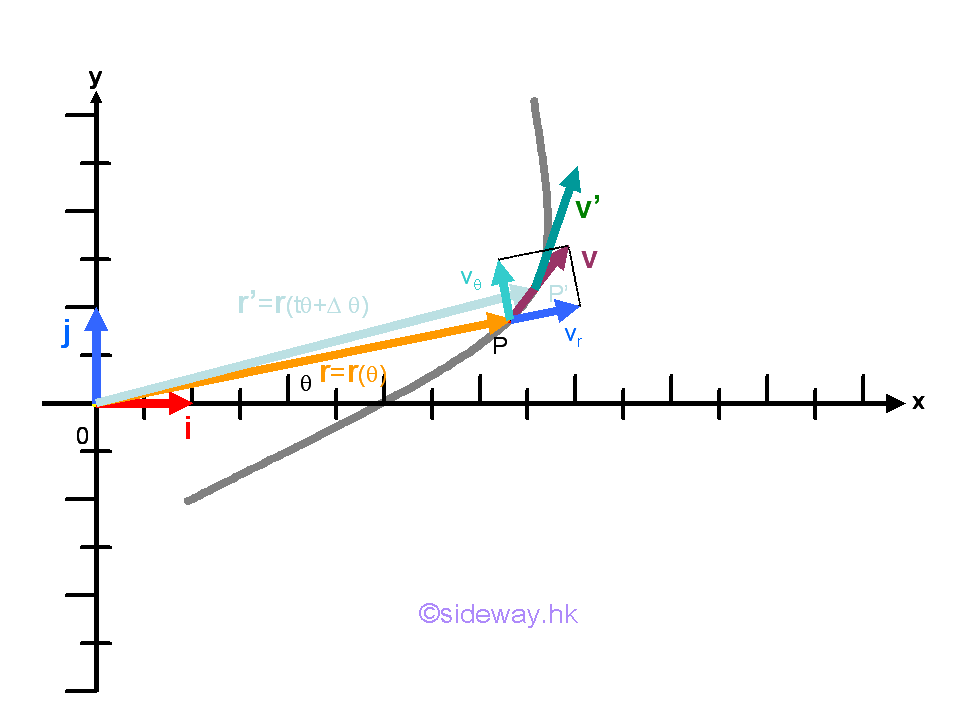
In case of using polar coordinates, the linear momentum of the object can be resolved into radial and transverse components. Since the radial component of the velocity vector is always collinear with the position vector, the angular momentum of the radial component of the linear momentum of object P is always equal to zero also. The angular momentum of object P about 0 is equal to the angular momentum of the transvers component of the linear momentum of object P only. 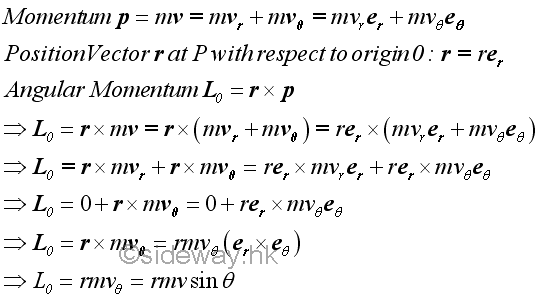
From kinematics, the transverse velocity of the object can be expressed in term of radial distance and rate of change of the polar angle. 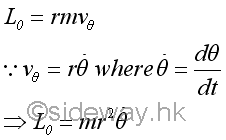
MomentResultant force acting upon an object is equal to the rate of change of the momentum of the object. Similarly, the resultant moment of an object about a reference point or axis is equal to the rate of change of the angular momentum of the object about the same reference point or axis. The rate of change of the angular momentum of the object about a reference point can be obtained by differentiation of the angular momentum of the object a bout the reference point with respect to time. Since both the position and velocity vectors are a function of time, the rate of chang of the angular momentum of an object is. 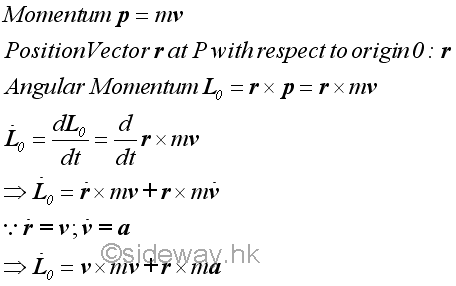
The first term of the left hand side expression is always equal to zero because the two vectors are always collinear. For the second term, by Newton's second law, the vector ma is equal to resultant force acts upon the object. And by the definition of moment, the second term of the expression is equal to the resultant moment of the object about the reference. Therefore, the rate of change of the moment of momentum, i.e. angular momentum, of the object about a reference point is equal to the resultant moment of the forces acting on the object about the reference point. 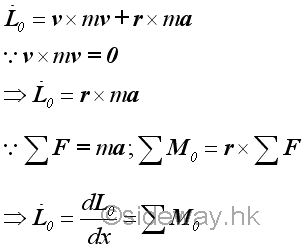
Equations of Kinetic MotionThe first equation of kinetic motion is derived from the rate of change of the momentum of an object. That is the resultant force is also equal to the rate of change of the momentum of an object. 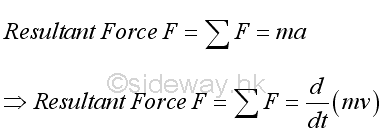
Similarly, another equation of kinetic motion can also derived from the rate of change of the angular momentum of an object by multiplying the force by the perpendicular distance from the rotating axis through the cross product. That is . 
For example, force acting on an object can be resolved into radial motion with radial and transverse components when the object moves in a plane. 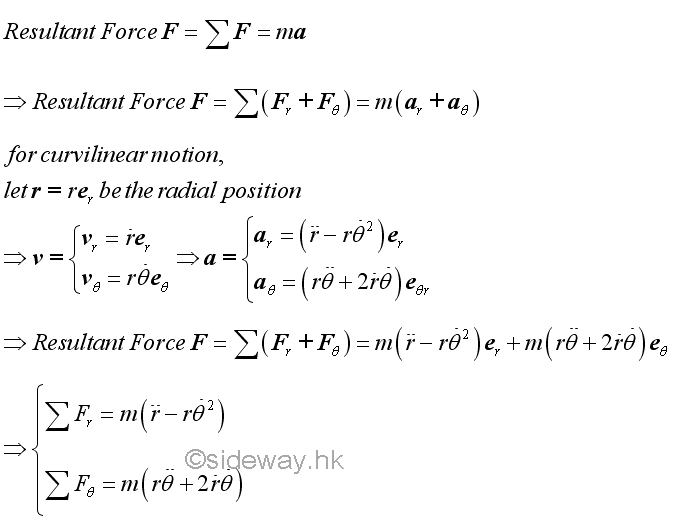
Similarly, moment of the object about a reference point can also be resolved into radial and transverse components accordingly when the object moves in a plane. 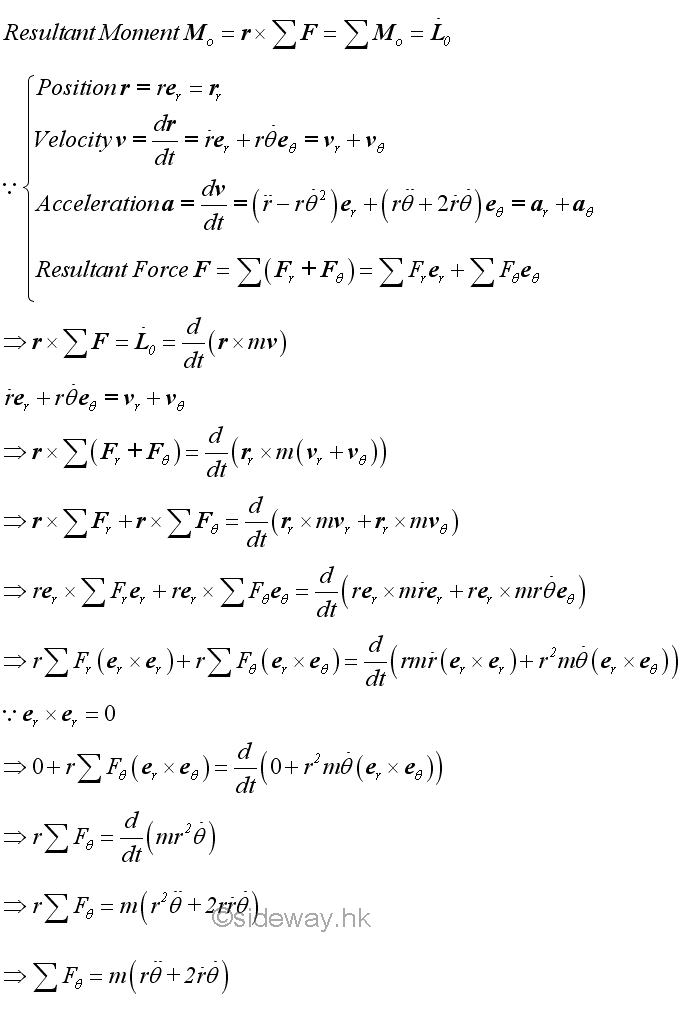
Dynamic EquilibriumIn general, resultant moment of an object is equal to zero in static equilibrium because resultant force is equal to zero. As the tenancy of an object to rotate about a reference point is equal to zero, the object can be either at rest or moving in constant velocity when an object is in static equilibrium also. Since the angular kinetic motion of an object can be expressed in terms of moment from the equation of kinetic motion, an equivalent negative moment vector can be added to the equation of kinetic motion to form an alternative form of equation of kinetic motion. Since the resultant moment is equal to zero, the alternative form of equation of kinetic motion can be considered as another equation of dynamic equibilibrium. That is
©sideway ID: 140900005 Last Updated: 10/10/2014 Revision: 0 Ref: References
Latest Updated Links
  Nu Html Checker Nu Html Checker  na na |
 Home 5 Business Management HBR 3 Information Recreation Hobbies 8 Culture Chinese 1097 English 339 Reference 79 Computer Hardware 249 Software Application 213 Digitization 32 Latex 52 Manim 205 KB 1 Numeric 19 Programming Web 289 Unicode 504 HTML 66 CSS 65 SVG 46 ASP.NET 270 OS 429 DeskTop 7 Python 72 Knowledge Mathematics Formulas 8 Algebra 84 Number Theory 206 Trigonometry 31 Geometry 34 Calculus 67 Engineering Tables 8 Mechanical Rigid Bodies Statics 92 Dynamics 37 Fluid 5 Control Acoustics 19 Natural Sciences Matter 1 Electric 27 Biology 1 |
Copyright © 2000-2024 Sideway . All rights reserved Disclaimers last modified on 06 September 2019