
Logarithm TheoremPythagorean TheoremCombinatoricsQuadratic EquationsSequence and Series Draft for Information Only
ContentVector Space
Vector SpaceThe most common types of vector spaces are a three-dimensional Euclidean space, a two-dimensional subspace, and a one-dimensional subspace. But, vector can be extended to 𝑛-dimensional space.Three-Dimensional Euclidean SpaceIn a three-dimensional Euclidean space, a point can be represented in one-to-one correspondence by a real number triple with respect to a coordinate system.Rectangular Cartesian Coordinate System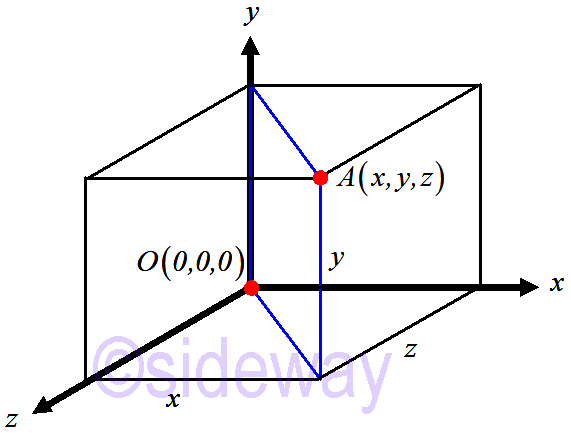 The rectangular Cartesian coordinate system is the most common and important coordinate system used in vector manipulation. The three-dimensional space is constructed by three concurrent and mutually perpendicular lines. The set of all real numbers are one-to-one correspondence with the points of each line. The three lines are arranged with the point of concurrence corresponds to 0 and have a common unit of measurement. The three lines are called axes and are denoted as 𝑋1, 𝑋2, and 𝑋3 axes, or 𝑥, 𝑦, and 𝑧 axes. For convenient, the variables used to represent a point are usually designated by 𝑥1, 𝑥2, and 𝑥3, or 𝑥, 𝑦, and 𝑧. There always exists an ordered triple of real numbers (𝑥1,𝑥2,𝑥3) or (𝑥,𝑦,𝑧) corresponds to each point of the three-dimensional space and conversely. The triple of real number must be in correct order because the order of triple must correlate with the order of axes arrangement. Therefore both coordinate axes and triple variables are usually named in alphabetic and numeric order for convenient.
The rectangular Cartesian coordinate system is the most common and important coordinate system used in vector manipulation. The three-dimensional space is constructed by three concurrent and mutually perpendicular lines. The set of all real numbers are one-to-one correspondence with the points of each line. The three lines are arranged with the point of concurrence corresponds to 0 and have a common unit of measurement. The three lines are called axes and are denoted as 𝑋1, 𝑋2, and 𝑋3 axes, or 𝑥, 𝑦, and 𝑧 axes. For convenient, the variables used to represent a point are usually designated by 𝑥1, 𝑥2, and 𝑥3, or 𝑥, 𝑦, and 𝑧. There always exists an ordered triple of real numbers (𝑥1,𝑥2,𝑥3) or (𝑥,𝑦,𝑧) corresponds to each point of the three-dimensional space and conversely. The triple of real number must be in correct order because the order of triple must correlate with the order of axes arrangement. Therefore both coordinate axes and triple variables are usually named in alphabetic and numeric order for convenient.
Rectangular Coordinate System ConfigurationAccording to the arrangement of coordinate axes in space, a rectangular coordinate system can be divided into right-handed or left-handed configuration. The most commonly used rectangular coordinate system are right-handed configuration.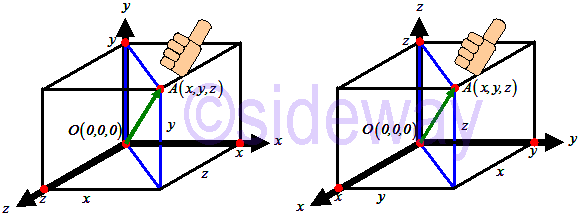 The configuration of a rectangular coordinate system is determined by the arrangement of positive axes. Consider a vector from origin 𝑂(0,0,0) to any point 𝐴(𝑥,𝑦,𝑧) in the positive region. The rectangular coordinate system is said to be right-handed configuration if the order of coordinate axes arrangement following the order of coordinate component is in the direction of right hand fingers with the thumb pointing along with the vector
The configuration of a rectangular coordinate system is determined by the arrangement of positive axes. Consider a vector from origin 𝑂(0,0,0) to any point 𝐴(𝑥,𝑦,𝑧) in the positive region. The rectangular coordinate system is said to be right-handed configuration if the order of coordinate axes arrangement following the order of coordinate component is in the direction of right hand fingers with the thumb pointing along with the vector 𝑂𝐴. 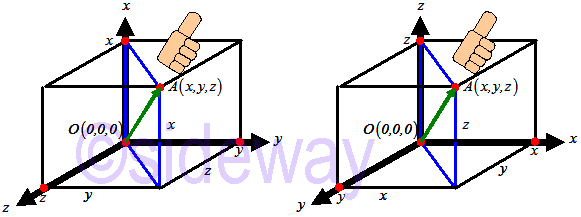 Similarly, consider a vector from origin 𝑂(0,0,0) to any point 𝐴(𝑥,𝑦,𝑧) in the positive region. The rectangular coordinate system is said to be left-handed configuration if the order of coordinate axes arrangement following the order of coordinate component is in the direction of left hand fingers with the thumb pointing along with the vector
Similarly, consider a vector from origin 𝑂(0,0,0) to any point 𝐴(𝑥,𝑦,𝑧) in the positive region. The rectangular coordinate system is said to be left-handed configuration if the order of coordinate axes arrangement following the order of coordinate component is in the direction of left hand fingers with the thumb pointing along with the vector 𝑂𝐴. Rectangular Coordinate ConfigurationRectangular Coordinate ConfigurationRight-Handed Rectangular Coordinate System : A rectangular Cartesian coordinate system is said to be right-handed only if the positive coordinate axes observed from outside to the origin is arranged following the order of coordinates in counterclockwise arrangement as the right hand fingers.
©sideway ID: 200201002 Last Updated: 2/10/2020 Revision: 0 Ref: References
Latest Updated Links
  Nu Html Checker Nu Html Checker  na na |
 Home 5 Business Management HBR 3 Information Recreation Hobbies 9 Culture Chinese 1097 English 339 Travel 45 Reference 79 Hardware 55 Computer Hardware 261 Software Application 213 Digitization 37 Latex 52 Manim 205 KB 1 Numeric 19 Programming Web 289 Unicode 504 HTML 66 CSS 65 SVG 46 ASP.NET 270 OS 431 DeskTop 7 Python 72 Knowledge Mathematics Formulas 8 Set 1 Logic 1 Algebra 84 Number Theory 206 Trigonometry 31 Geometry 34 Calculus 67 Engineering Tables 8 Mechanical Rigid Bodies Statics 92 Dynamics 37 Fluid 5 Control Acoustics 19 Natural Sciences Matter 1 Electric 27 Biology 1 |
Copyright © 2000-2026 Sideway . All rights reserved Disclaimers last modified on 06 September 2019