Equilibrium in Two Dimensions Reactions at Supports and Connections
Equilibrium in Two Dimensions
Many practical engineering problem can be considered as a planar
rigid body in two dimensions. The conditions for the equilibrium of a rigid body
is.
and
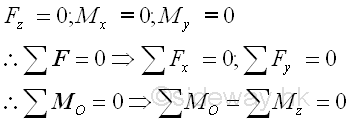
By neglecting the z axis dimension. Imply
When a rigid body is in static equilibrium state, the moment
at any point A in the planar structure is equal to zero also, imply
Only two translational and one rotational motion are
needed for determining a two
dimensional structure is in static equilibrium state or not.
In other words, the possible forces and moments
due to an applied action or a
reaction in a two dimensional structure are two rectangular forces and
one moment, or one resultant force and one moment.
Since there are only three equations obtained from the equilibrium
equations of a rigid
body in two dimenstion, no more than three unknowns can be determined by the
system of three equations.
Reactions at Supports and Connections
In order to construct the free body diagram for analysing the equilibrium of
rigid body in two dimensions, the types of reactions at supports and connections
should be evaluated first.
The types of reactions at supports and connections can be divided into three
types:
Reactions equivalent to a force and a couple
For fixed support, no translational motion and rotation motion is allowed for
the free body to move and thus the free body is fully constrained.
The resultant reactions are equal to one resultant force and one couple, or two
rectangular force components of the resultant force and one moment of the
couple.
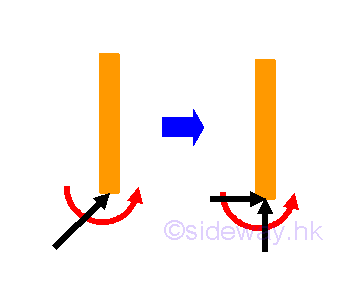
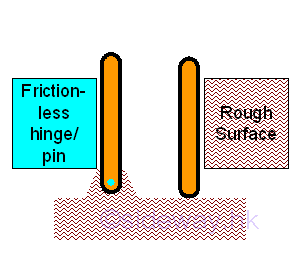
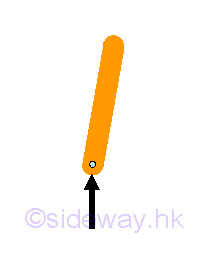
Reactions equivalent to a force
For
hinged support or connection, the rotational motion is enabled by equipping with
a fictionless hinge or pin, or a free or rounded end, no couple is reacted by the support
or connection on the free body. But, the translational motion is stopped by
either the reaction force of the hinge support or the friction force generated
by the rough surface.
The resultant reactions is equal to one resultant force, or two
rectangular force components of the resultant force.
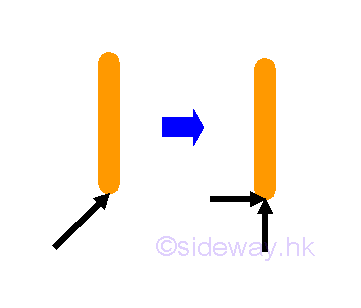
Reactions equivalent to a force with known line of actionown line of action
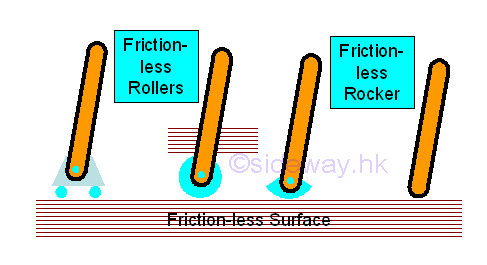
For roller support or connection
The rotational motion is enabled by equipping with
a fictionless hinge or pin, or a free or round end, no couple is reacted by the support
or connection on the free body. Besides the roller motion also allows a free translational motion
in the direction along the frictionless surface. The roller motion can be a roller wheel, a
guided roller, a rocker on a smooth surface, or a free or rounded end on a smooth
surface. Although one component of the rectangular reaction force is equal to zero, the translational motion is
still constrained by the other component of the rectangular force generated by the support or connection
The resultant reaction are equal to one reaction force
which is always normal to the non-constrained free motion direction.
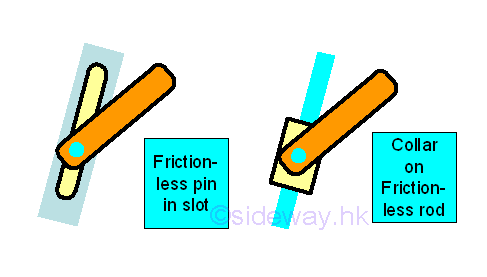
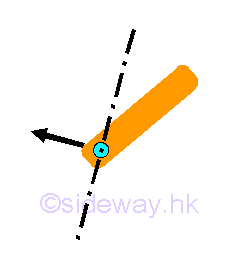
For
free sliding guide with hinge pin support or connection
The rotational motion is enabled by equipping with
a fictionless hinge or pin, no couple is reacted by the support
or connection on the free body. Besides the free sliding guide also allows a free translational motion
in the sliding direction. The free sliding guide can be a frictionless pin in slot, or a
collar on a frictionless rod. Although one component of the rectangular reaction force is equal to zero, the translational motion is
still constrained by the other component of the rectangular force generated by the support or connection
The resultant reaction are equal to one reaction force
which is always normal to the non-constrained free motion direction.
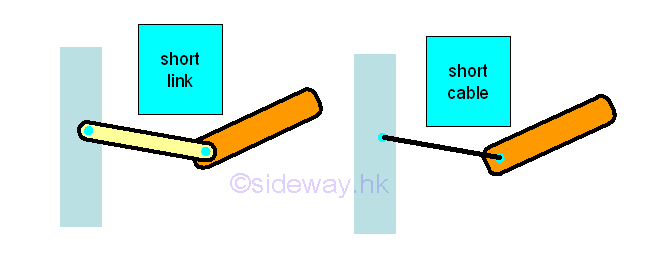
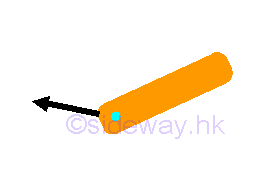
For
free short cable or link support or connection
For a cable, the only possible reaction force is the tension of the cable. For a
free short link, the rotational motion is enabled by equipping with
two fictionless hinge or pin on both ends of the link, no couple is reacted by the support
or connection on the free body. Because of the two frictionless hinge on both sides of
the link, any translational motion normal to the link becomes a free rotation
motion of the link about the other end of the link. Therefore a free short link
also allows a free translational motion normal to the connecting axis of the
link. Although one component of the rectangular reaction force is equal to zero, the translational motion is
still constrained by the other component of the rectangular force generated by the support or connection.
Therefore both a free short cable and link provide only one constraint along the
cable or link to the
free body.
The resultant reaction are equal to one reaction force
which is always align with the connecting axis of the cable or link. And for the
cable, the reaction force is always away from the free body.



 Nu Html Checker
Nu Html Checker  na
na 
 and
and